A capacidade de transformar ambientes do mundo real em simulações interativas deixou de ser um processo que demanda dias ou semanas de trabalho. Graças às inovações como o NVIDIA Omniverse NuRec e o 3DGUT (3D Gaussian with Unscented Transforms), desenvolvedores e pesquisadores agora podem reconstruir cenas 3D fotorrealistas a partir de dados de sensores simples e implantá-las instantaneamente no NVIDIA Isaac Sim ou no CARLA Simulator.
Este artigo detalha o fluxo de trabalho para capturar dados do mundo real, treinar uma reconstrução neural e carregar os resultados diretamente no Isaac Sim, abrindo novas portas para a simulação e o treinamento de sistemas autônomos.
Vídeo 1: As bibliotecas de reconstrução neural NVIDIA Omniverse NuRec trazem o mundo real para a simulação, utilizando dados de múltiplos sensores para criar ambientes fotorrealistas essenciais para testar e validar sistemas de robótica e veículos autônomos.
A Magia da Reconstrução Neural: Do Real para o Digital
A reconstrução neural representa um avanço significativo, permitindo o treinamento eficiente de robôs em simulações que espelham a realidade com precisão, o que melhora substancialmente a transferência do aprendizado da simulação para o mundo real. As etapas a seguir desmistificam o processo de reconstrução neural e sua renderização, transformando-o em uma receita prática para diversos ambientes de desenvolvimento.
Figura 1: Exemplo de cena criada com o Omniverse NuRec, otimizada para treinamento de robôs em ambientes simulados.
Etapa 1: Capturando a Essência do Mundo Real
O primeiro passo é a captura cuidadosa da cena. É fundamental obter aproximadamente 100 fotos de diferentes ângulos, garantindo boa iluminação e sobreposição significativa entre as imagens. Essa sobreposição é crucial para auxiliar na correspondência de recursos visuais. Recomendações de especificações incluem: abertura f/8, velocidade do obturador 1/100s ou mais rápida, e uma distância focal de 18 mm ou similar.
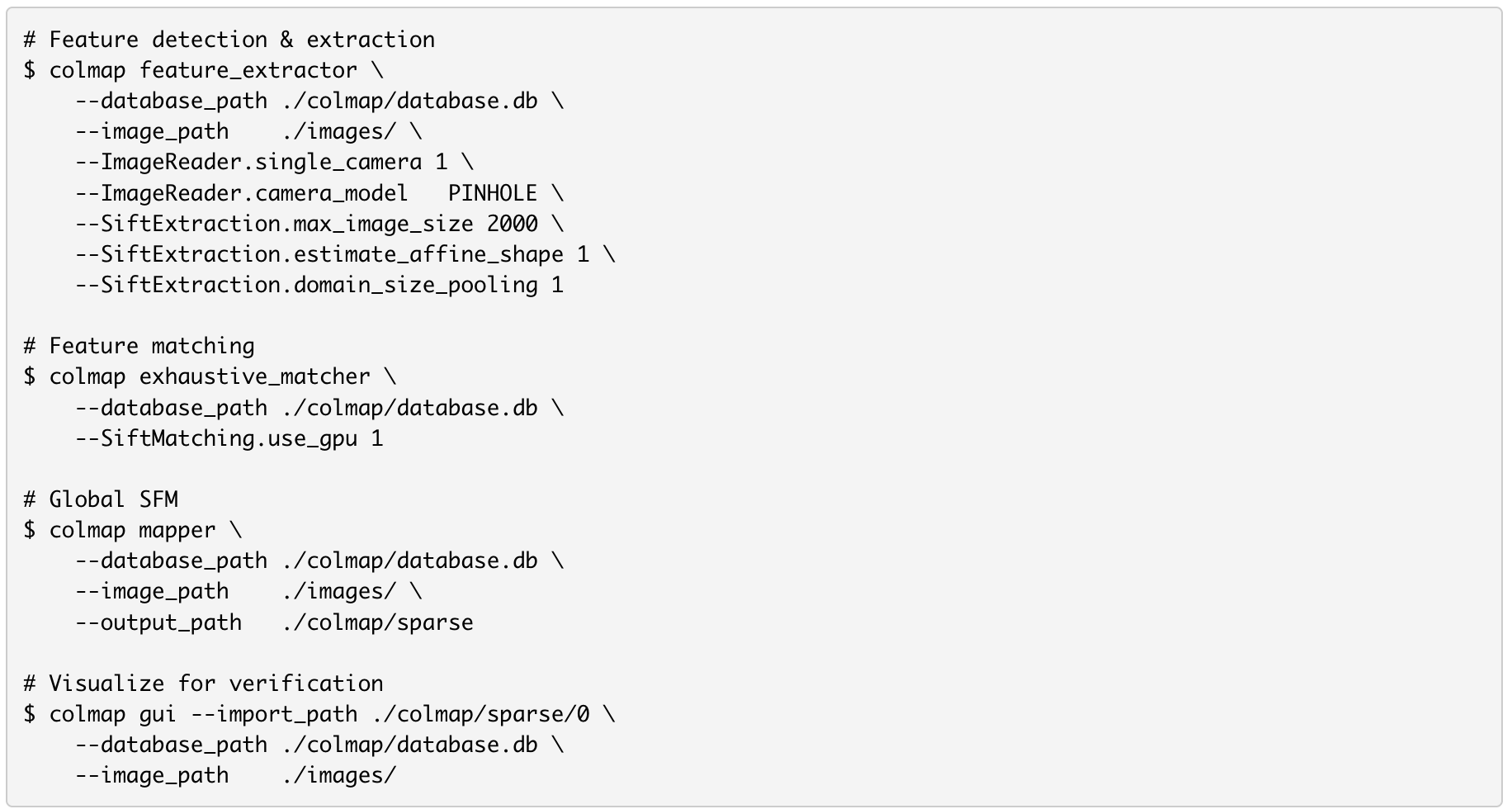
Etapa 2: Gerando a Reconstrução Esparsa com COLMAP
Para criar uma nuvem de pontos esparsa e determinar os parâmetros da câmera, utiliza-se o COLMAP, um robusto pipeline de Structure-from-Motion (SfM) e Multi-View Stereo (MVS) de uso geral. Este processo pode ser realizado via sua interface gráfica do usuário, usando a reconstrução automática, ou por meio de comandos específicos para extração e correspondência de recursos, seguido da reconstrução esparsa. Para garantir a compatibilidade com o 3DGUT, é essencial selecionar o modelo de câmera *pinhole* ou *simple pinhole*.
Detalhes Técnicos: COLMAP
COLMAP é uma ferramenta de código aberto para reconstrução 3D de coleções de imagens. Ela estima a pose da câmera e a estrutura 3D da cena a partir de fotos 2D, gerando uma nuvem de pontos que serve de base para reconstruções mais densas, fundamental em projetos de visão computacional e robótica.
Etapa 3: Treinamento com 3DGUT para Reconstrução Densa
Com as saídas geradas pelo COLMAP em mãos, o próximo passo é utilizar esses dados para treinar o modelo com o 3DGUT, utilizando a configuração apps/colmap_3dgut_mcmc.yaml. Este treinamento visa transformar a reconstrução esparsa em uma representação 3D densa e fotorrealista, pronta para ser integrada em ambientes de simulação avançados.
O que é 3DGUT?
O 3DGUT (3D Gaussian with Unscented Transforms) é uma técnica inovadora que utiliza uma representação de cena baseada em Gaussianas 3D para reconstruir ambientes complexos com alta fidelidade e em tempo quase real, otimizando o processo de renderização e garantindo um fotorrealismo impressionante para simulações e IA.

Conclusão: O Futuro da Simulação na Ponta dos Dedos
A combinação de ferramentas como NVIDIA Omniverse NuRec, 3DGUT e COLMAP democratiza o acesso à criação de ambientes simulados altamente realistas. Isso não apenas acelera o ciclo de desenvolvimento e teste para robótica e veículos autônomos, mas também impulsiona a inovação em diversas áreas da inteligência artificial e programação. A capacidade de levar o mundo real para o digital em questão de minutos, e não semanas, é um divisor de águas para a comunidade de desenvolvedores, e a Vibe Coding Brasil está animada para ver as novas possibilidades que essa tecnologia trará!